Power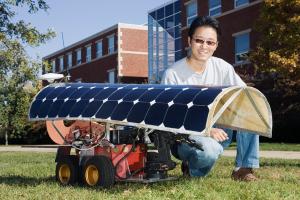
The first issue that arises when you shift from human labor
to mechanical labor is energy source. After all, what good
is a design, if there is not sufficient power to run the
robot? While humans can gain energy through food, sleep, and
other activities, robots must have an electrical power
source. To sway toward a more environmentally suitable
design, robots should make use of solar, wind, water based,
and other natural forms of energy. Already, the University
of Illinois has developed a weeding robot that, unlike
Lukas, runs on solar power (shown right) [10].
Data Collection and Response
The next problem to deal with when designing rural robots
is how the mechanism collects and responds to certain
situations. Just as skilled farmers take into account the
weather, season, and plant conditions, robots must analyze
the same factors when performing their tasks.
In the future, weather stations may relay information to
the agricultural robots that water and harvest plants.
Robots will then correctly know when to plant which crop
because they will be informed of the season, temperatures,
cloudiness, and other abiotic factors. With regards to
disease detection, robots can use methods similar to pollen
detection used by meteorological centers to identify harmful
microscopic organisms and viruses. Photographic methods like
those used by Lukas have already proven to be accurate in
perceiving and eliminating weeds [6].
On a similar note, fruit picking robots could also develop
ethylene level detection because ethylene is a key chemical
in determining the ripening of fruit. As a whole, if robots
have such sufficient capabilities, they will surely remove
human labor costs and hence allow cheaper production.
|