| Evolution of Design
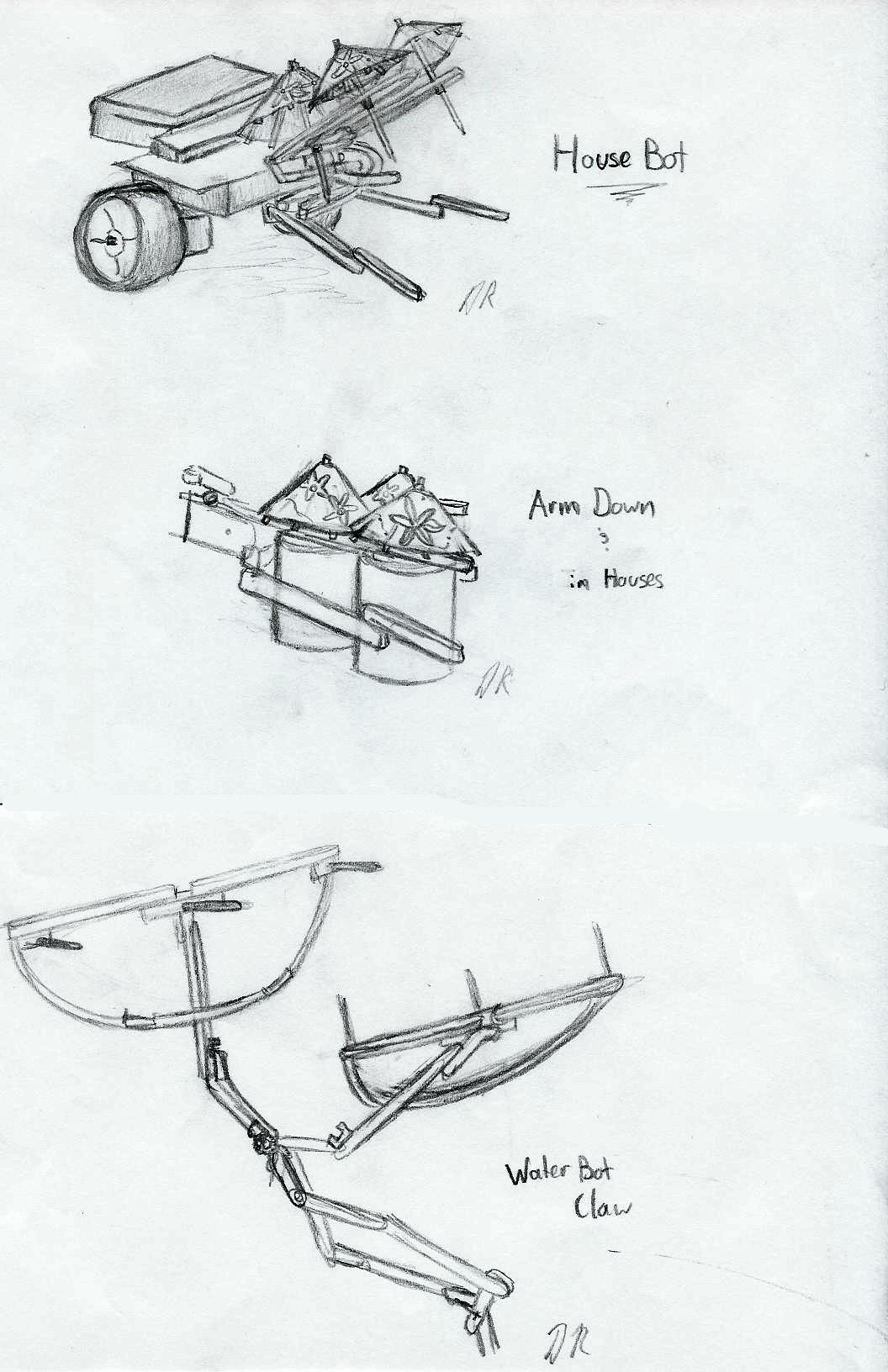
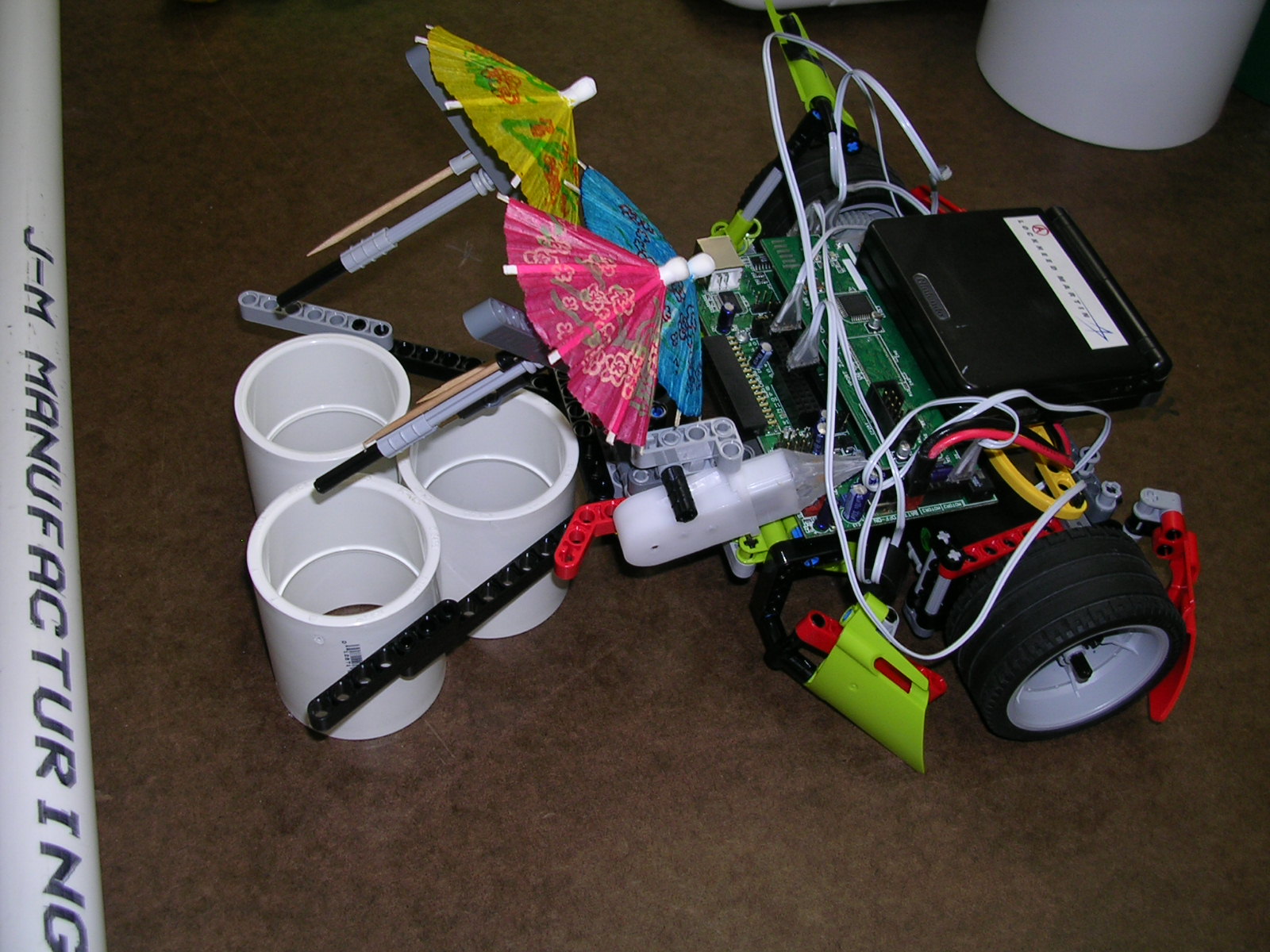
Our original design has been pared down from our first
concept. Comparing it to the original idea, we have dropped the “tribble
collector,” that collects and scores point with the pineapples. After
discussing the idea as a team and experimenting for a few days with it, we
came to the conclusion that since we had not made any design breakthroughs
already, we needed to devote the rest of the time to the more reliable
ideas that had a higher chance of success, such as our house collector and
water handler. The other reason we dropped it was due to a shortage of
space. The current point manipulation mechanisms took up too much space on
our current chassis, and having to fit another such mechanism would have
necessitated expansions that would have placed us out of the starting box,
which is quite illegal.
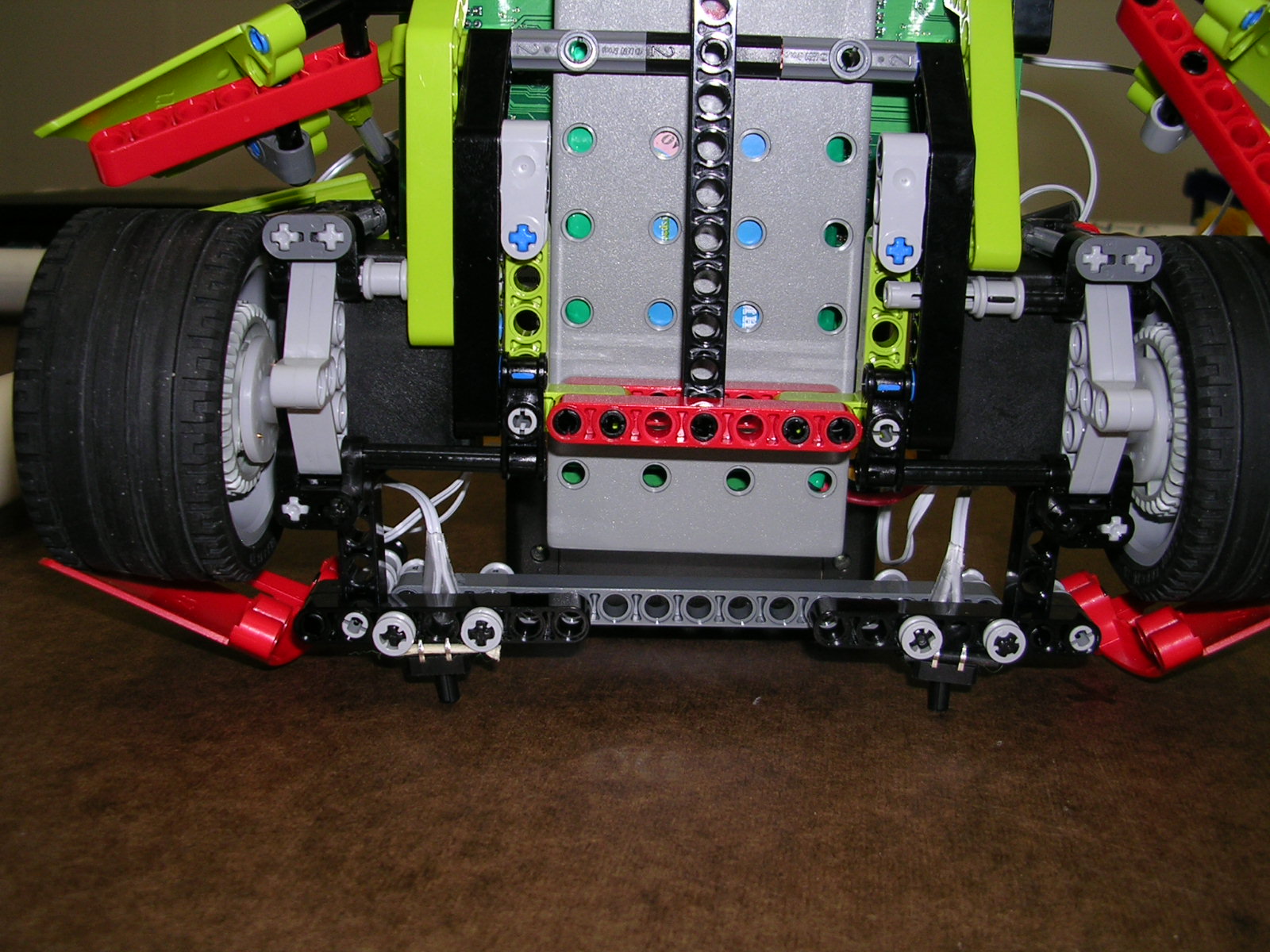
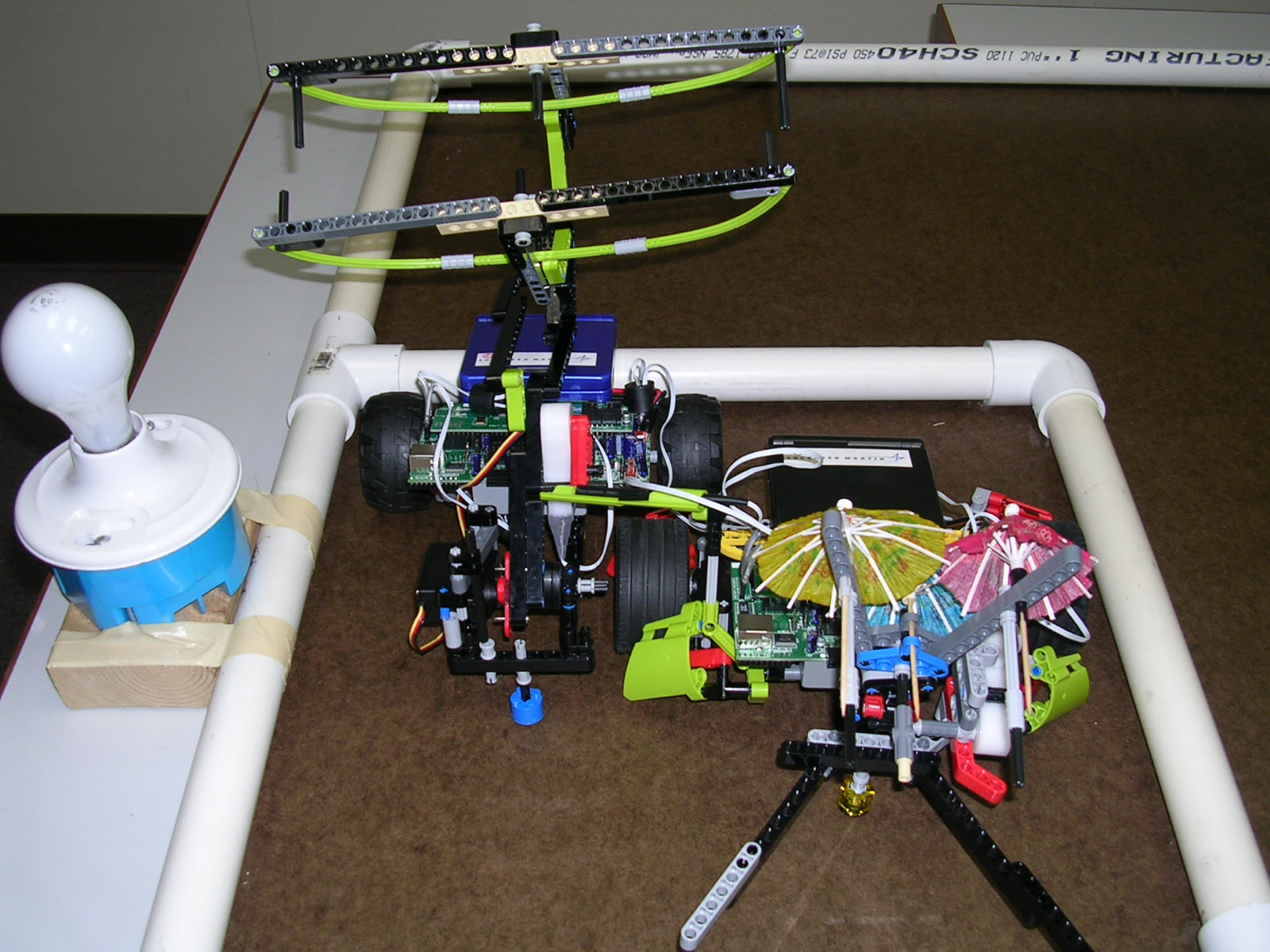
Our additions to our design came after our team’s realization that
navigation could be slightly complicated. Currently we do have a method
for moving exact distances and making exact turns, but after testing on
the board, the probability of success is not as high as we would like.
Therefore we installed a pair of touch sensors on the back of both robots,
to allow for our robots to line themselves up with the PVC piping, using
it as simple, easy-to-use navigation. Once we tested our current code, we
realized another failsafe was needed; thus, the touch sensors are used to
accurately move about the board.
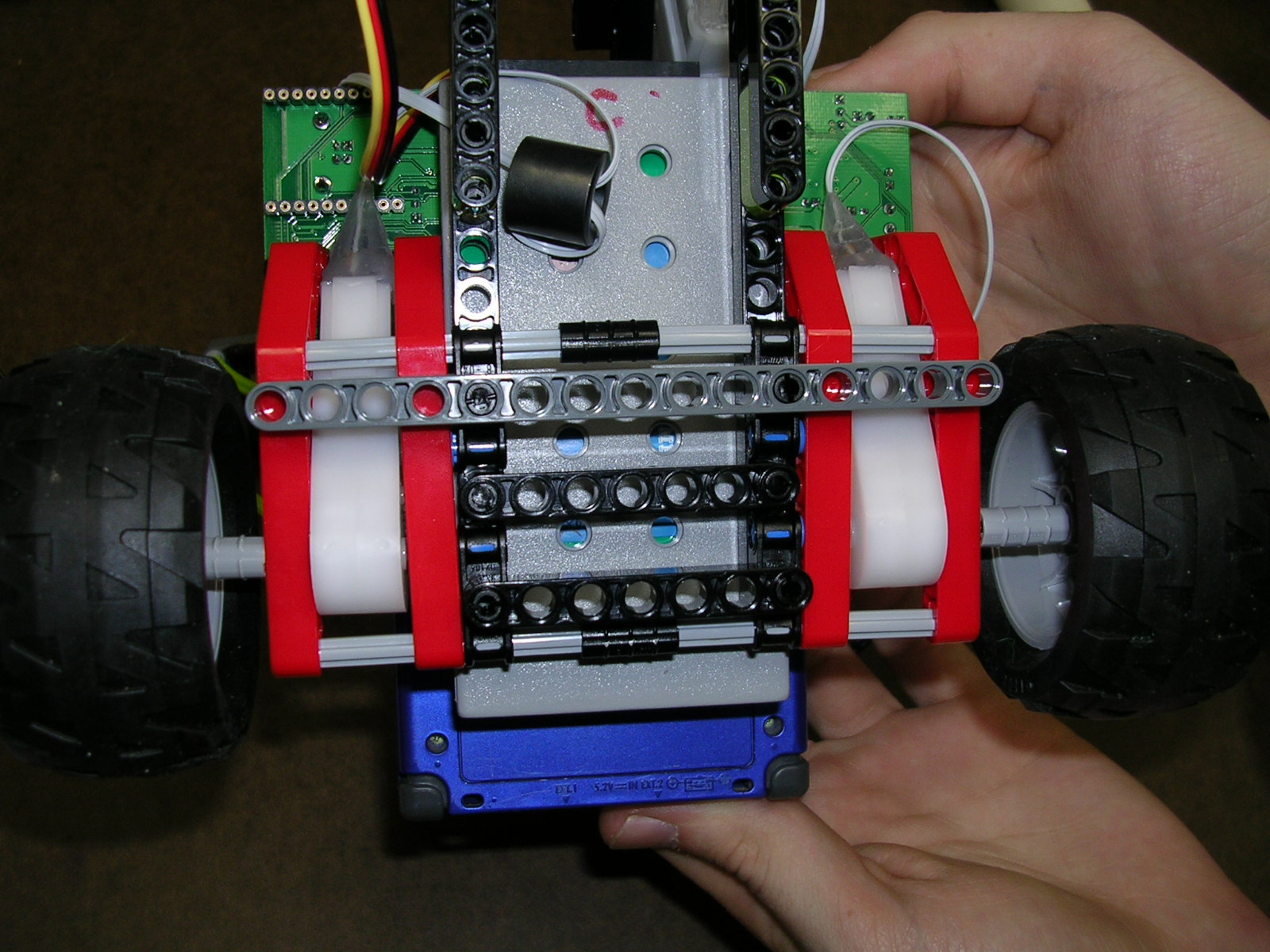
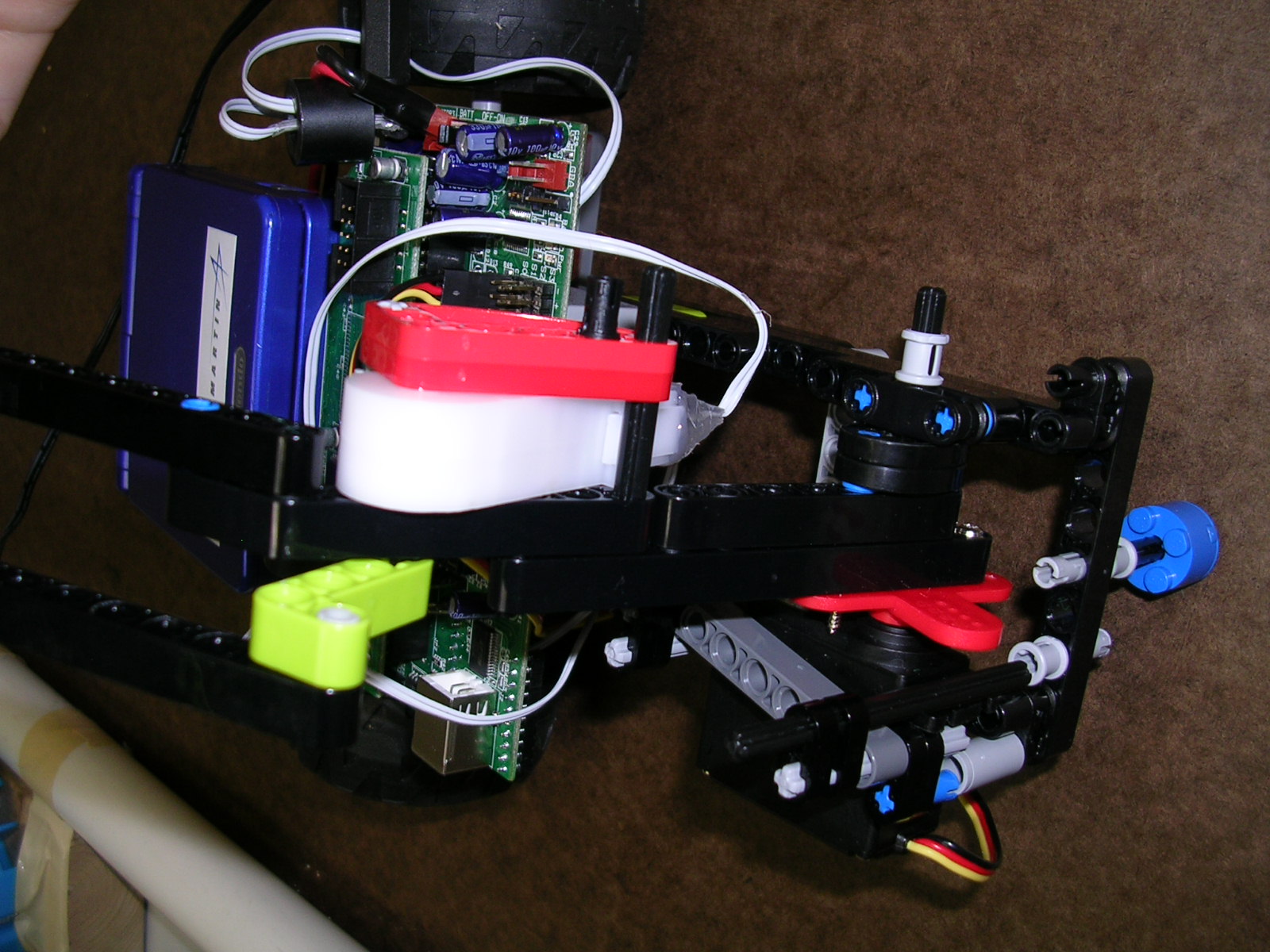
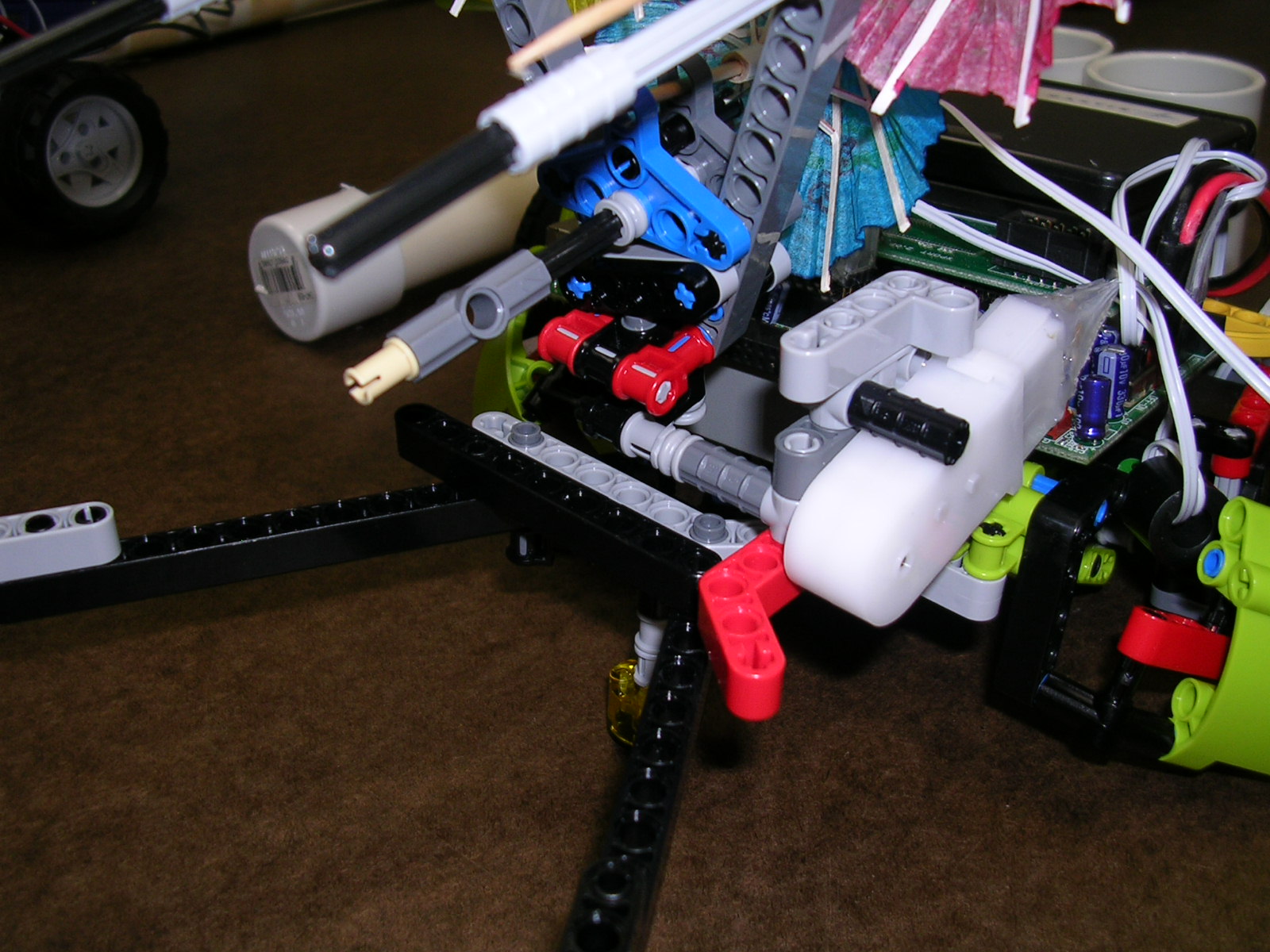
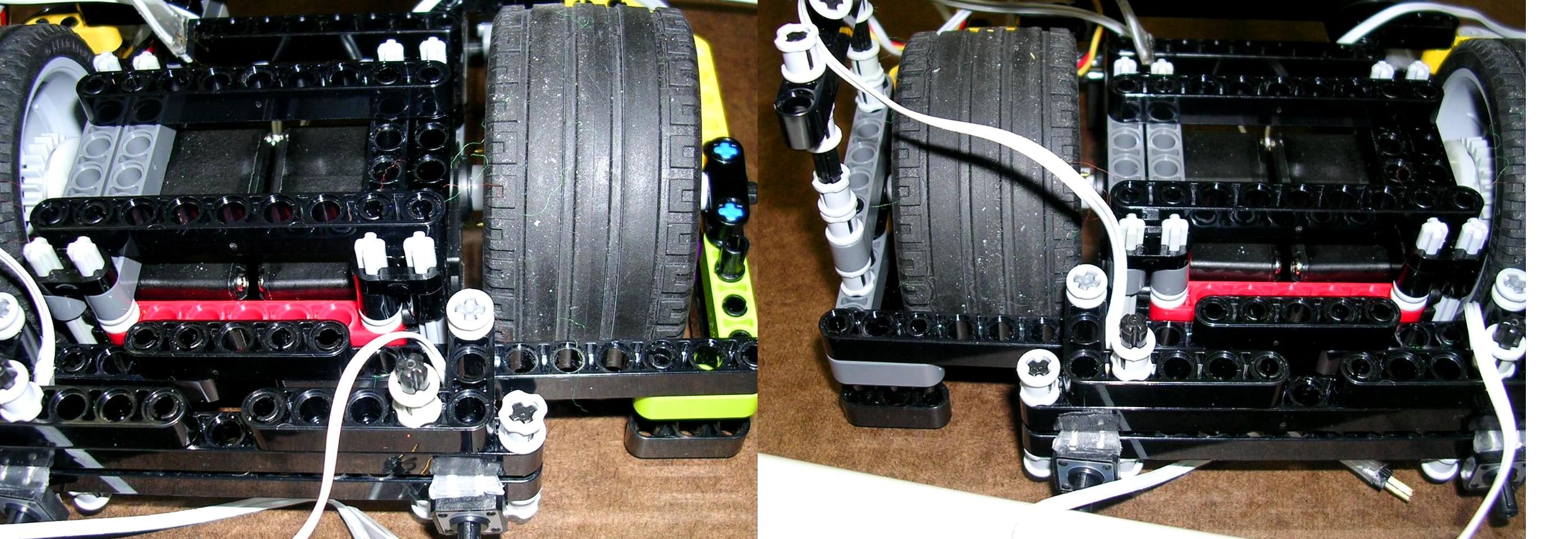
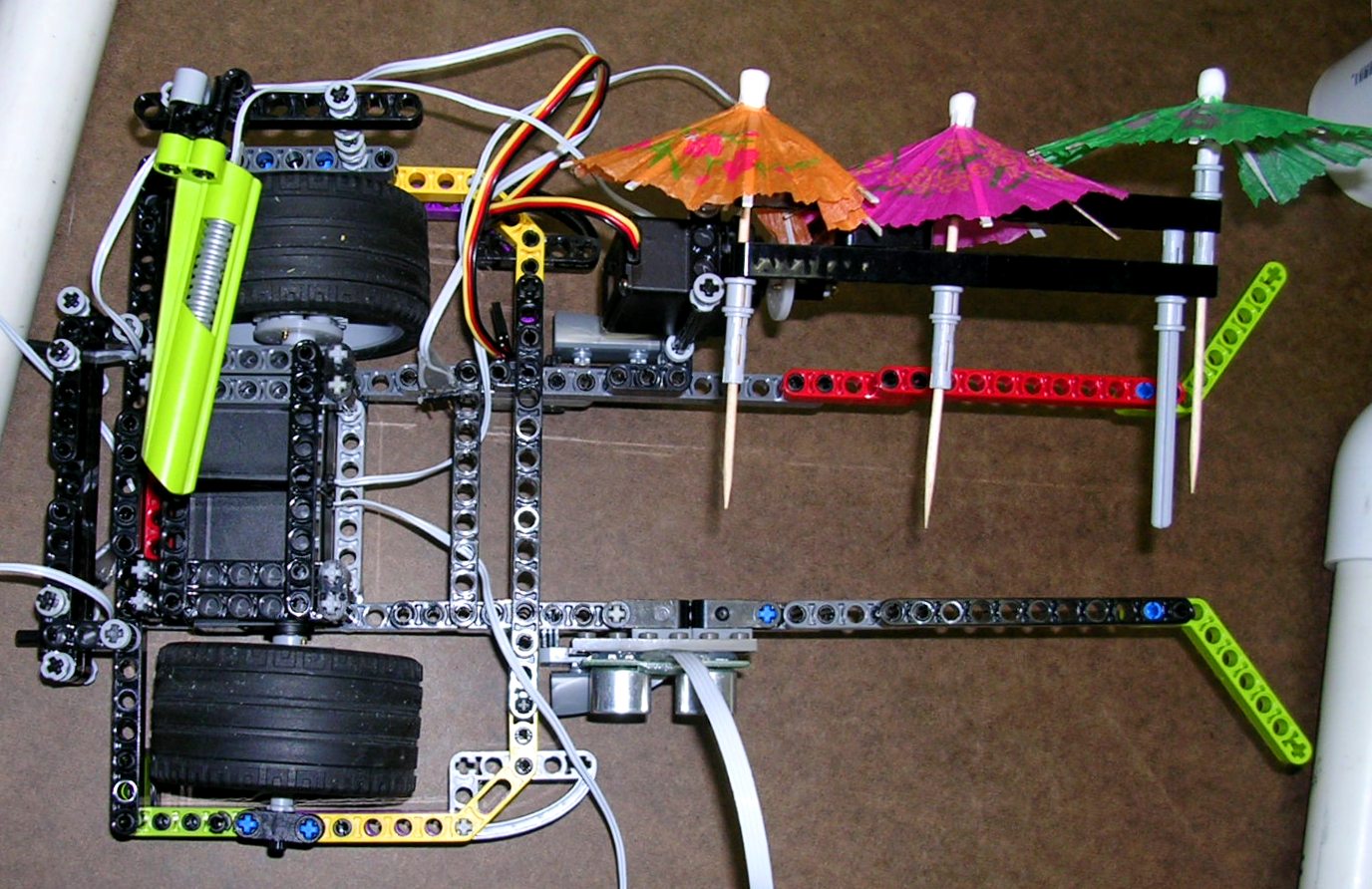
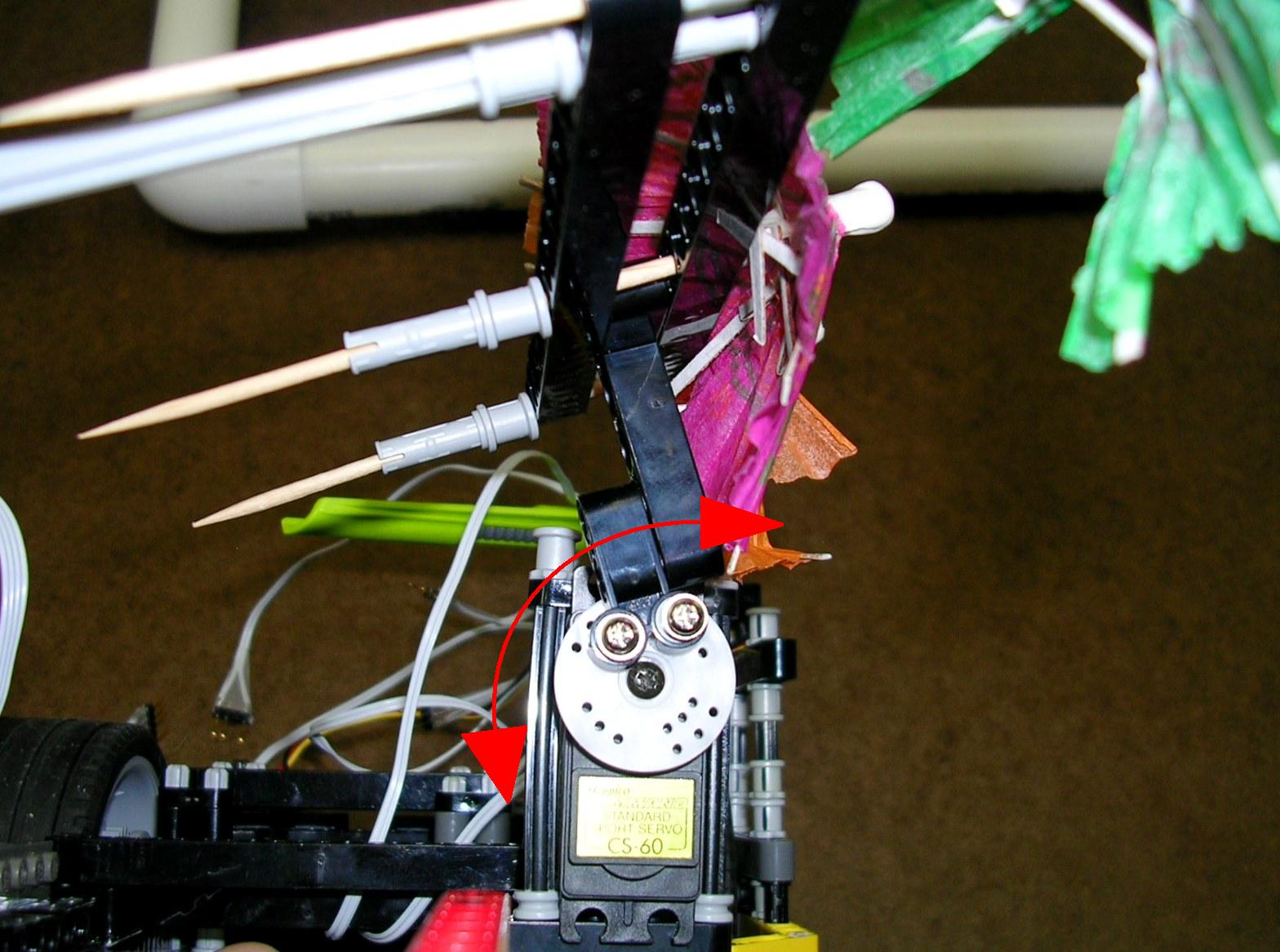
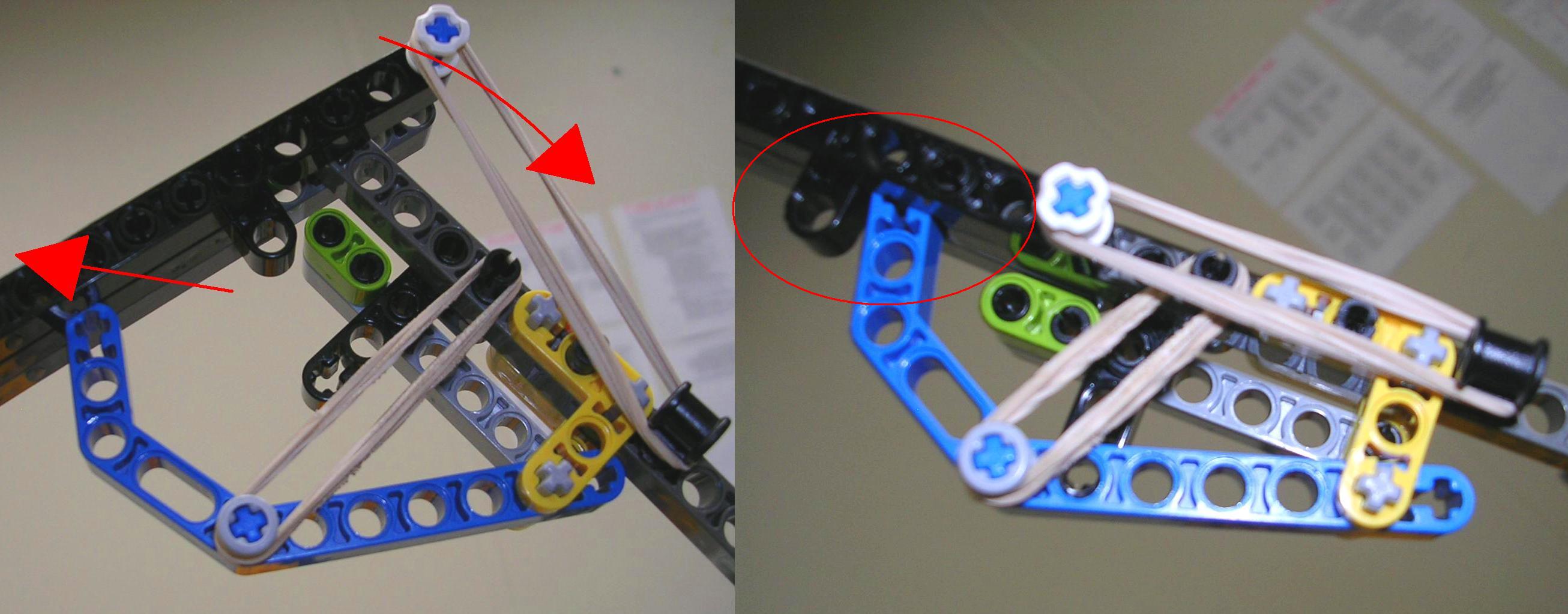
One of the issues that plagued us for quite some time was the arm to move
the house shield down onto the captured houses. Our initial concept just
had a simple lever attached to the small silver motor, to knock the arm
over. However, this proved unreliable, as jarring movement of the robot
(as in navigation) could knock the arm down. It also disallowed us from
being able to pull the arm back up, should we need to. One of our team
members came up with a very interesting idea: a worm gear. He used a
normal wheel gear attached to the motor and a worm gear on the arm to move
it up and down. This too, had an issue. The silver motor moved too quickly
to make it effective; it broke the worm gear apparatus every time. We
still had not yet realized the simplest solution: mount a different motor
directly onto the hinge. It’s fairly simple, we just used a different
motor with a more manageable speed, and directly linked it to the hinge.
Robot Testing
The testing regimen for both of our robots really
revealed a great deal about the problems that we were having.
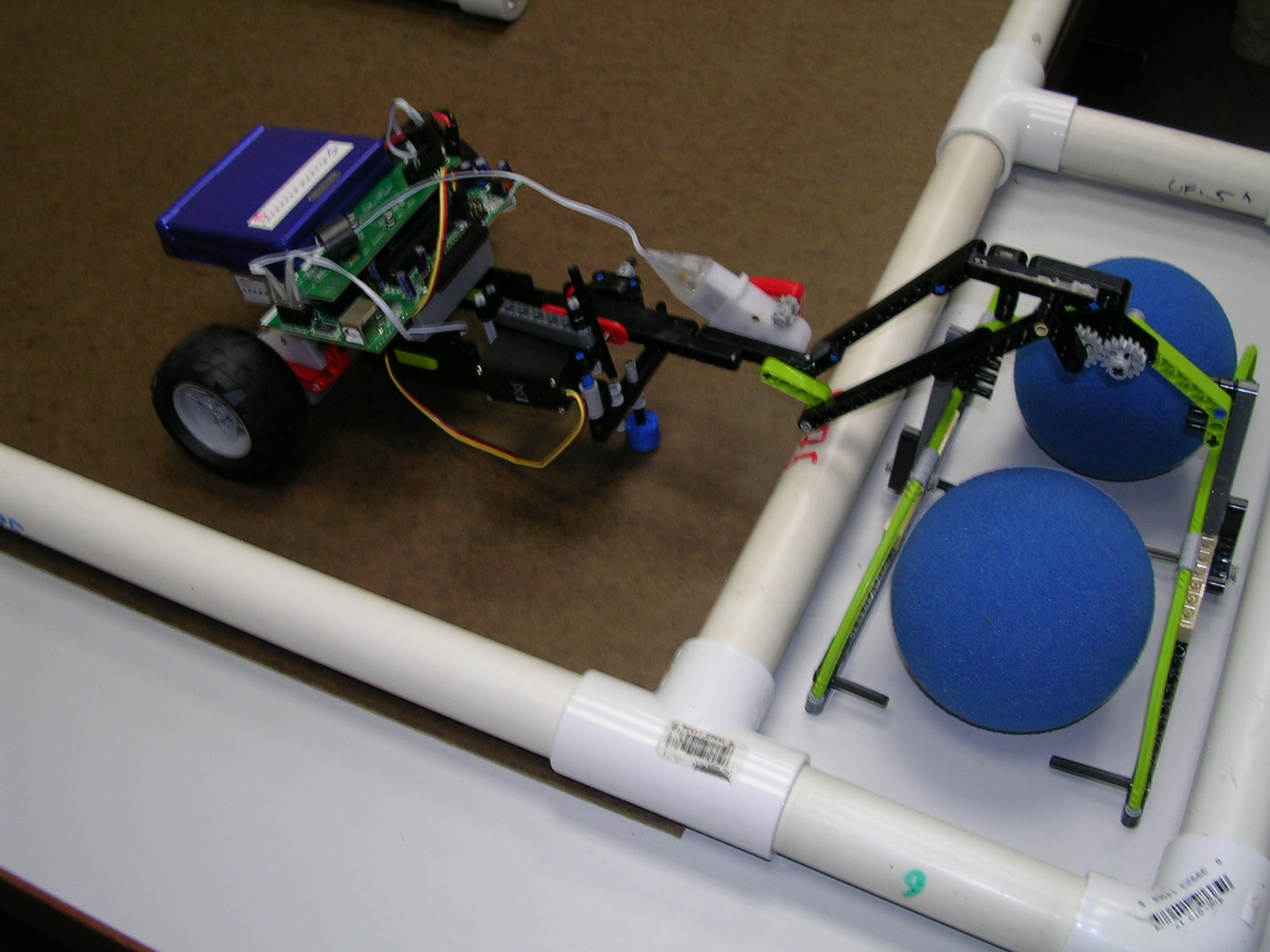
Our testing table has been constructed since the first day of the
competition. Our sponsor, Bob Ekman, graciously went out and purchased the
PVC parts that we needed to build it. It was built exactly to
specification, with all of the item locations clearly marked, trying to
create the most realistic testing environment possible.
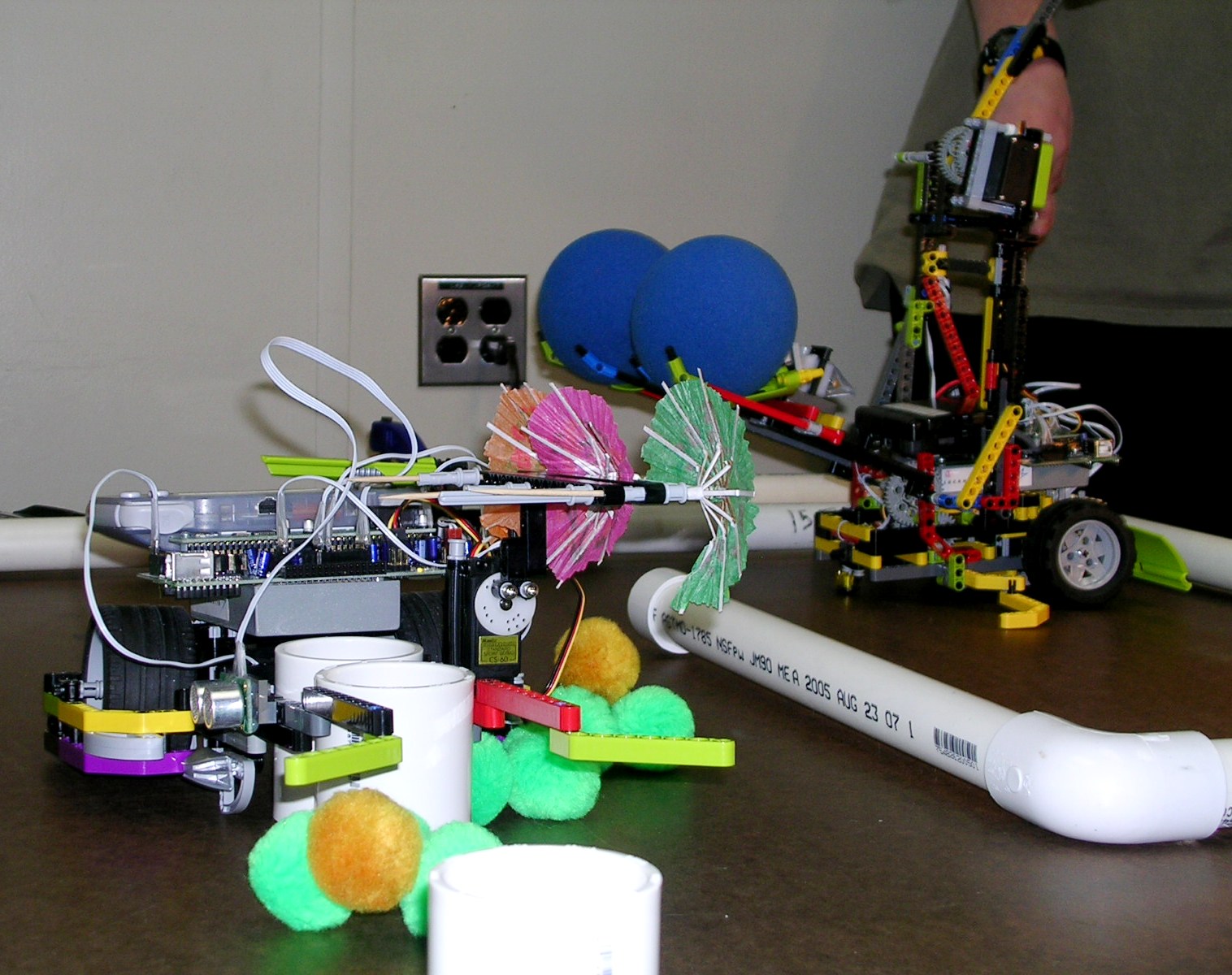
As can be seen from the tables below, we ran tests of our House Collection
robot both with and without tribbles, We were pretty confident about our
robot without the tribbles, since our average score was quite close to 24
points, our expected total for that particular robot.
Here is a table of House Bot tests from May 5.
Without Tribbles With Tribbles
Trial Points
Trial Points
1 24
1 24
2 24
2 24
3 15
3 10
4 24
4 24
5 16
5 3
6 15
6 16
7 24
7 8
8 24
8 16
9 0
9 8
10 24
10 8
Average 19
Average 14.1
Before this date, on April 29th, we used the Rockville Science Fair as a
chance to test our robots vigorously and often. It helped to reveal many
shortcomings of our robot, but due to the venue, we were not able to fix
all of them at that time.
Our testing with the light sensor has been limited. Usually it's the
simplest part of the design, and only a few more lines of code to add. On
May 7th, we added the game clock functions to the code, and have it
stopping and starting after the 90 seconds, regardless of functions. Our
light sensor were also tested on May 7th. Our options for shielding the
light sensor from surrounding light have been limited. The provided Lego
pieces have not provided us with suffecient shielding from the various
other light sources inthe rooms.
As our testing shows, we switched off our testing both with and without
the tribbles included on the board. Should any of our sweeping mechanisms
fail (leaving the tribbles on the board in the path of our robots) the
robots will still be able to perform their tasks correctly. Also, due to
our own issues with trying to move over the PVC pipings, we do not forsee
any forays onto our side of the board, and thus have determined that time
better used would be spent on getting our robots to work properly and
efefctively.
Botball Lessons Learned
Through our Botball experience, Team 129 has learned how
to assume roles to better act as a team, how to plan our project step by
step, and, perhaps most importantly, how to work and cooperate with each
other. When we first began to attend workshops, many members of the team
were new at Botball robotics. We also came from schools scattered across
the county; many of us would never had met at all had it not been for
Botball.
Like any team, 129 realized collectively that for our robotics endeavor to
succeed, we would have to form some kind of organizational system. We
spent quite a bit of the first few meetings discussing our particular
strengths and weaknesses, and talking about how each person would want to
be involved in the team. After we had designated one person as a general
leader, some people as programmers, and others as engineers, our team
operated a lot more smoothly. A team functions best, when every member
works not only at what they are best at, but what they enjoy doing. Team
129 understood this, one of the earliest lessons that we learned.
The next step, after we had organized ourselves, was to organize our
project. We quickly found out that we could not proceed blindly ahead
without forming a clear and distinct plan, one that would allow us to
score the maximum amount of points, yet be flexible enough to accommodate
any obstacles we might encounter. Our earliest plans were outlined on
whiteboards and then transferred onto the computer. After a few sessions,
we discovered one of the most important parts of any plans: compromise.
Our sub-divided teams were so focused on their strategies that many people
haven’t realized that Don Imus called Girls Basketball team ‘Nappy Headed
Hos.’ That is right; we are so self centered, we have no idea what anyone
else is doing, which in a way is restricting our ability to separate our
good ideas from bad ones due to a lack of comparison.
We have resolved to solve this issue by having a general 10 minute meeting
to discuss what everyone is doing and how they plan to do it. We also plan
to make a table to distinguish high scoring ideas from low scoring ideas
and hard to do ideas from easy to do ideas. This helped us rationalize the
good from the bad and the easy from the difficult. We hence aimed to focus
on the easy, high scoring ideas and ignore the hard to do, low scoring
ideas. We need to assess difficulty and do a better analysis of scores in
the future.
We also had problems with poor use of our testing table. Many people were
found to be misusing the testing table as a building site or a food stand.
This not only clutters the place where important scrutiny and development
and recycling of ideas takes place but also leads people to become
completely disorganized. We need to reserve the testing table for testing
and quick repairs only.
We also desperately needed checklists at this point in the game! We had
people working on robots that no one yet knew the purpose of, let alone
how to operate them. A checklist is essential to ensure that if by some
misfortune the leader of the robot is absent, someone else can replace and
effectively operate the robot at the competition. Moreover, we have to
make sure that tasks are comprehensible and easily comprehendible in a
checklist format. We have seen the use of checklist save the day! We need
to make sure in the future that this is squared away as quickly as
possible, so that no one is left in a blind spot during the regionals.
Another dilemma that our team has faced is the apparent distortion of
cooperation. It has been noted that one member of the team begins the code
without commentary, then another attempts to continue writing the code
with the absence of any direction hence resulting in a code that is off
the task requirements. We must make it a point to comment on our codes no
matter what! This way the goals and what the program actually does is not
a mystery! Let’s not make this Jeopardy! We needed comments to ensure that
anyone can understand exactly what was happening, without puzzling over it
for an hour!
Moreover, it seems that with such a large group of individuals each
divided into sub-groups, decisions and progress are hard to come by just
like the legislative process is slow and painstaking. But this reaches
extreme annoyance when 3/4 of the group decides that it is not necessary
to attend the regular meetings. This has become a real issue. Although
this is somewhat understandable since the AP exams are here and many
people are under stress and pressure, those who just "wing it when they
feel like it" should realize their commitment to this project. Because of
this lack of cooperation, our team had to compensate for lost time and try
to cramp hours of programming code and last minute building. We should
learn from this mistake and make sure not to make it precedence for future
teams. It is essential to work together to perform well and learn.
Another very important lesson learned was to delete the old versions of
the software, especially if the icons look the same. You see, an
interesting little incident occurred during one workshop. The problem
occurred when the wrong version of IC was clicked because both icons were
on the desktop right next to each other and one was randomly picked to
open. So the wrong IC was open and some minor modifications were made to
the code of the refining robot. Yet when we attempted to download the
code, of course the libraries didn't match up. So the firmware was
redownloaded, except that this just made things worse. Then the code was
downloaded. Then we tried to run...Nothing worked except the motors. The
servos didn't enable, the sensors didn't give input, it was scary - we
thought we broke the XBC. So after many fruitless attempts at
redownloading the libraries, redownloading the firmware, checking all the
servo and sensory connections, we were just about to give up and tear the
bot apart to replace the XBC. But as we closed IC and saw the wrong icon
still highlighted on the desktop, it hit us all at once! It was absurd. We
promptly deleted the wrong IC software and redownloaded the correct
firmware and the code. If this had happened during competition...that
would be tragic.
Our documentation process helped our team question the excruciating
process that writers undergo when they are having road-blocks; in our case
we found it extremely surprising that documenting progress is quite easy,
when your team is making progress. Documenting went smoothly considering
that we had minimal problems with our bots. |