|
Botball Research
Project | |
|
Mission to the lunar surface to search for water/ice in
the Aiken Basin.
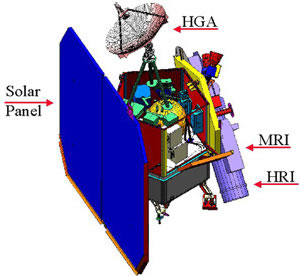
Where We Will Look We plan to look at a number of sites dispersed over the area of the basin. Here are some details. Differences Between Our Robot and Mars Rovers The interesting thing is that despite the similarities in the goals of the two robots, the designs are not similar at all. There are no wheels and no landing craft with retro-thrusters and giant balloons because our's hangs out in the cold expanse of space. Here is a spreadsheet on the subject -- BotComparison.xls. What it looks like
Imitating the design of the Deep Impact satellites carries the advantage of using already tested methods and equipment. How it will move The complication of surface mobility was one of the reasons we decided to remove the issue from the equation. The satellite will travel using the gravity of the moon. How it will navigate/be controlled There are two options for how the satellite will navigate. How it will be powered The satellite will be solar powered. How it will try and find water Here are some details on how the satellite will find water.
Essentially, we plan to take existing technology and mission elements to initiate the exploration of the Lunar south pole craters. We do not think crawling robots like the Mars Exploration Rovers are suitable for exploring the dark craters at this time. The environment is too hostile. We need to know more about the craters before we can develop surface crawlers. We will need a several Lunar polar orbiting satellites in place for the crawlers to communicate with Earth and to potentially receive energy from microwaves or the sun.
[1]http://www.nasa.gov/vision/space/features/apollo11_35th.html
| |